6.扩展模块
该章节主要展示,在了解RhinoX基本SDK功能的基础初上,结合一些外部模块开发出功能更强大的MR应用。如利用网络同步功能,实现 多人协同;利用Unity ARFoundation以及网络同步实现移动端设备的第三视角等等
6.1 多用户协同网络工具库
如果您需要实现多用户协同使用的场景,可以参考此章节。
工具库下载地址:
https://gitee.com/PolyEngine_Ent/RhinoX-MultiUser-Demo
注解
如果显示为此网页无法查看,请先注册gitee账户并登录。
如果您是初次接触网络同步开发,您可以在 示例教程 中查看详细文档进行入门学习
6.1.1 概述
多用户协同网络库是专为以下应用场景设计的工具库:
多个 RhinoX 用户在同一个物理房间内协同交互。
使用手机的用户在上述物理空间中, 观察/协同上述 RhinoX 用户的交互。此功能还需结合 移动端MR应用定位系统 功能库。
使用电脑的用户, 通过固定摄像头, 在上述空间中和RhinoX用户交互。此功能还需结合 电脑端MR应用定位系统 功能库。
注解
除了多用户协同网络工具库, 还有很多第三方网络工具库可以实现上述功能,例如 Unity 官方推出的 Multiplayer, Photon的Bolt系列, DarkRift Networking 等等。
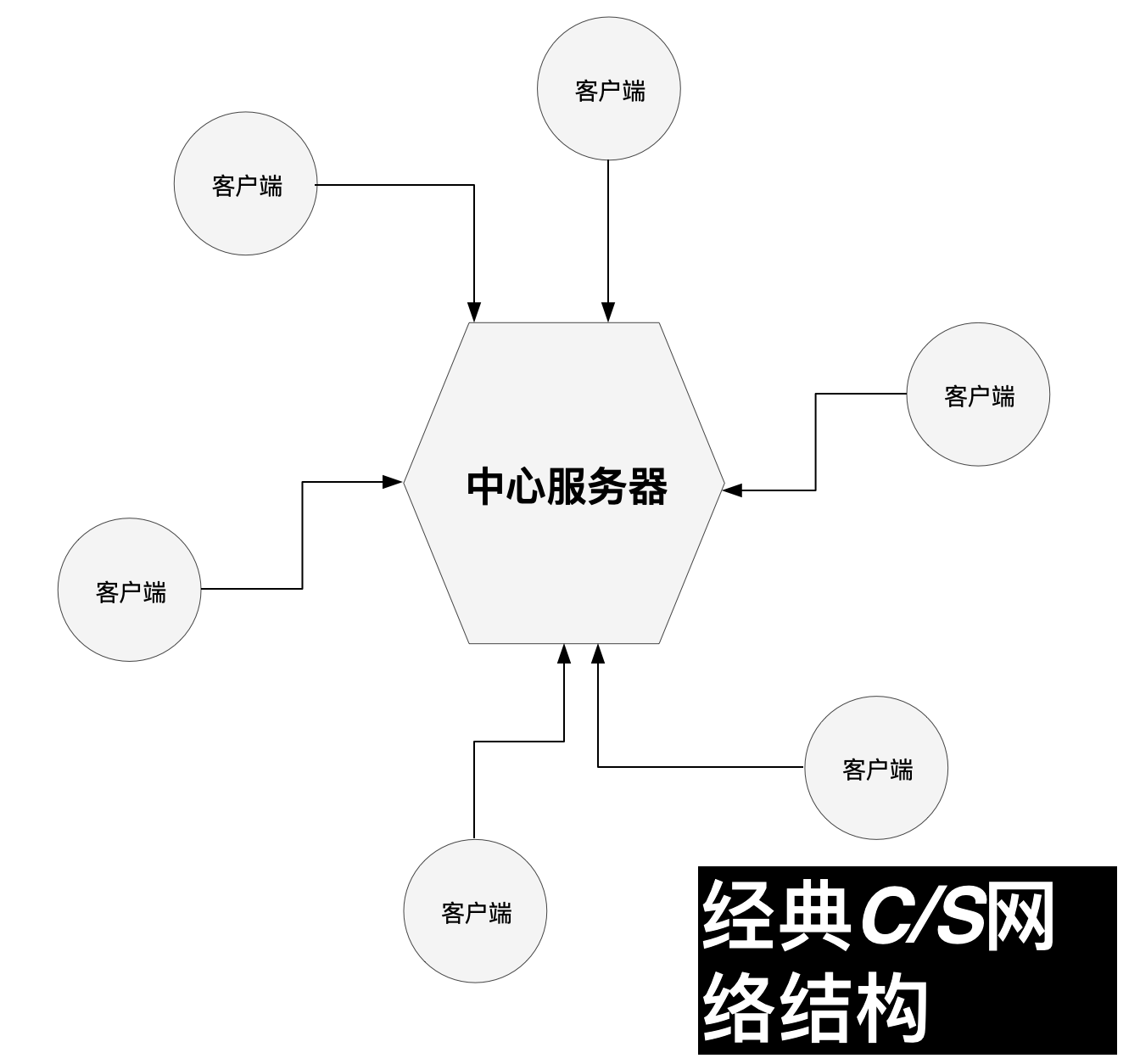
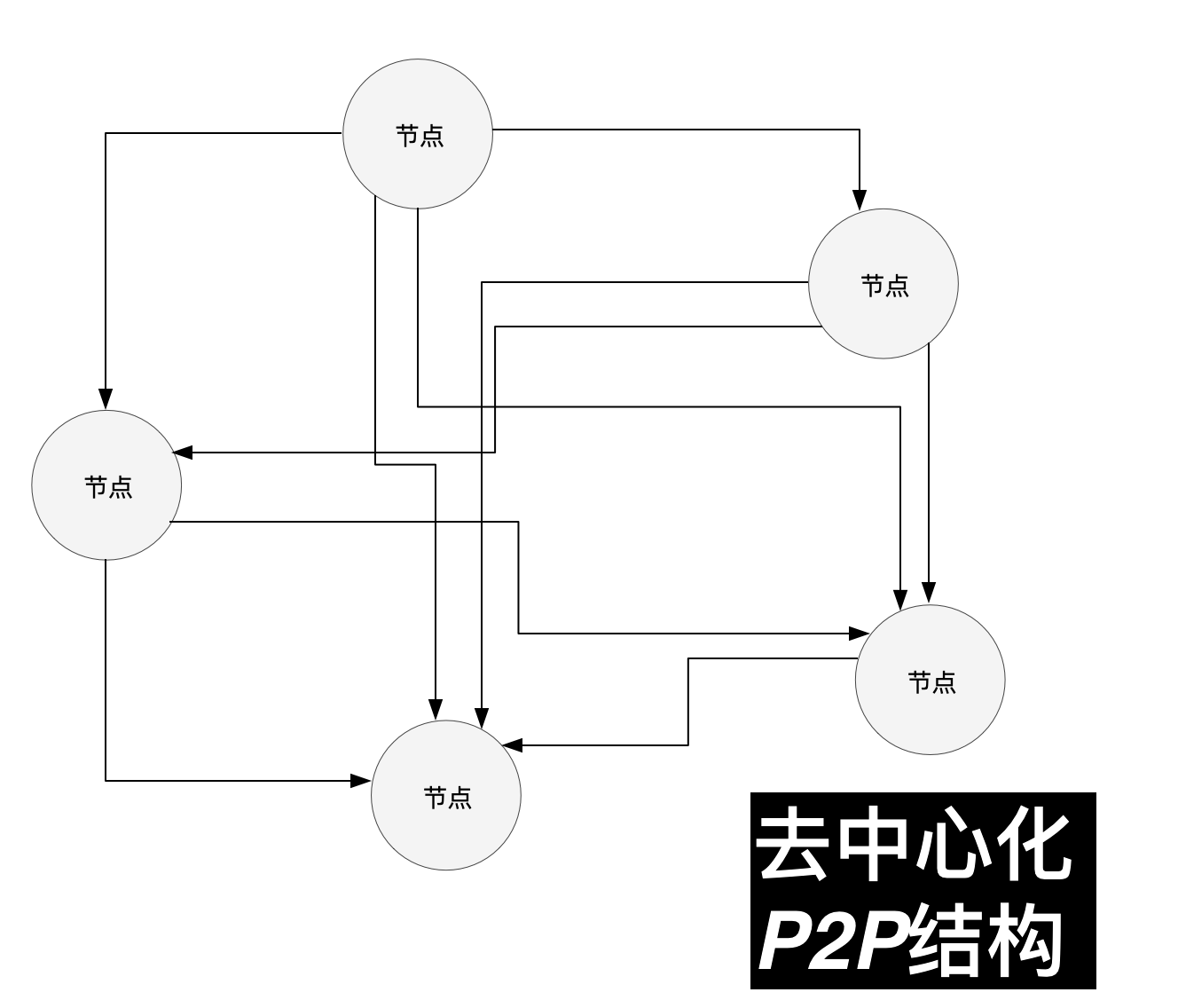
大多数网络工具库都是按照经典的 Client - Server 中心化拓扑结构实现。这种结构中都有至少一个中心服务器和若干个客户端组成。 服务器负责调度信息的派发,客户端监听信息并负责渲染和用户呈现。
多用户协同网络工具库和上述C/S网络结构不同之处在于, 它是基于去中心化的P2P拓扑结构, 多个网络节点之间是相互直连的蛛网式结构。
6.1.2 优势以及限制:
优势
轻便, 不需要部署服务器。 终端设备只要接入局域网即可。
兼容所有设备, 无论PC,安卓手机,苹果手机 ,RhinoX 头显都可以使用。
开发逻辑既能实现P2P结构,也能兼容C/S结构。
限制
目前只支持局域网。
相比于经典C/S结构,对于一些强中心化的需求, 例如AI的同步, 环境物体的状态同步,稍显复杂。
6.1.3 类结构介绍:
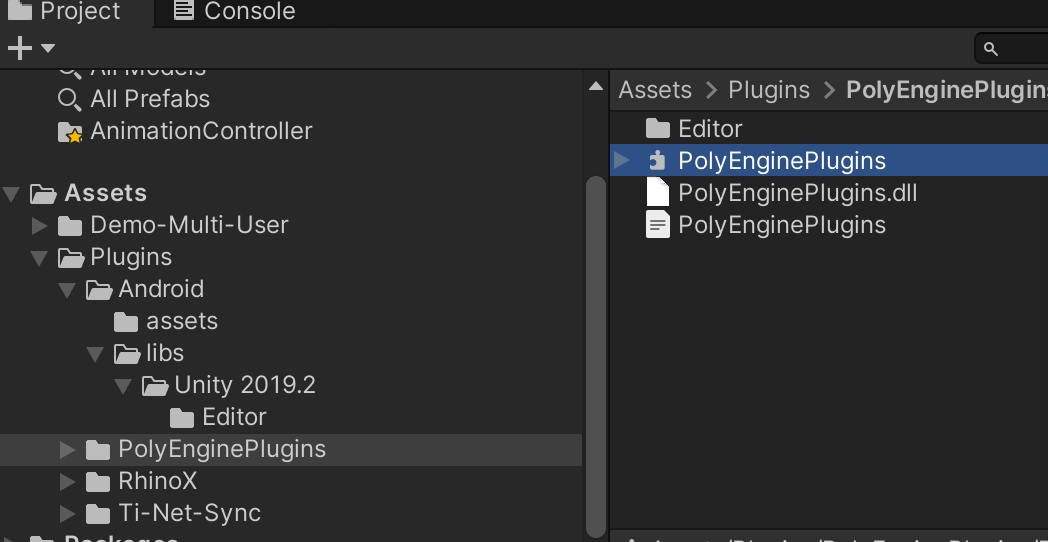
核心库: PolyEnginePlugins.dll
多用户协同网络工具库和核心类都封装在此动态链接库中。
注解
PolyEngine是Ximmerse曾经组建的内容开发工作室, 内容支持工具都封装在以此命名的动态链接库中。
核心类: TiNet
TiNet 是多用户协同工具库的核心类, 负责网络节点之间的互连, 消息的投递和接收。
开源网络应用代码包: Ti-Net-Sync
多用户协同网络工具库和核心类都封装在此动态链接库中。这些开源代码是基于 TiNet 核心类实现的网络应用示例。
注解
Ti-Net-Sync 是基于 TiNet 核心库实现的应用示例。 不代表此网络工具库的全部功能, 用户可以基于这些sample code, 按照自己的实际需求做定制化开发。
6.1.4 核心类Tinet介绍:
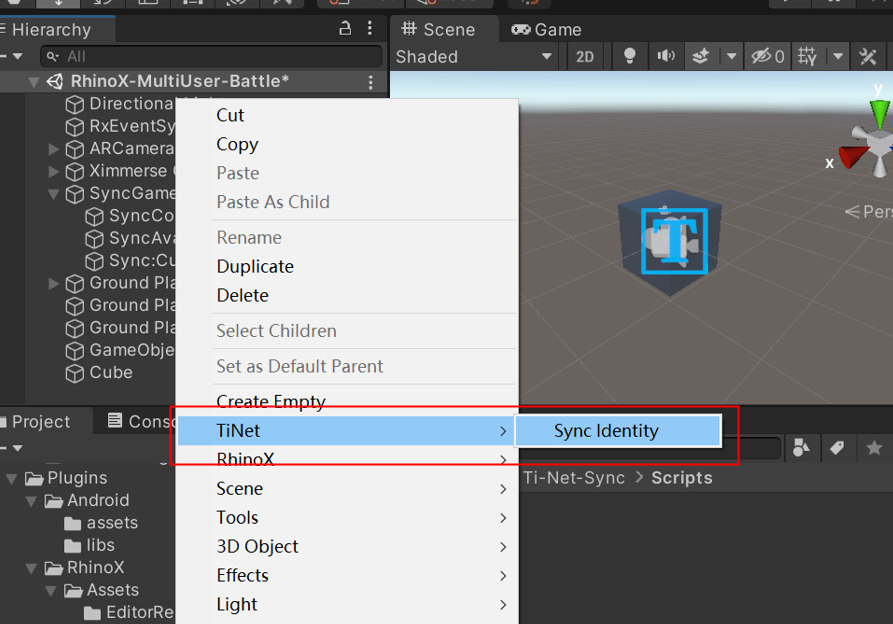
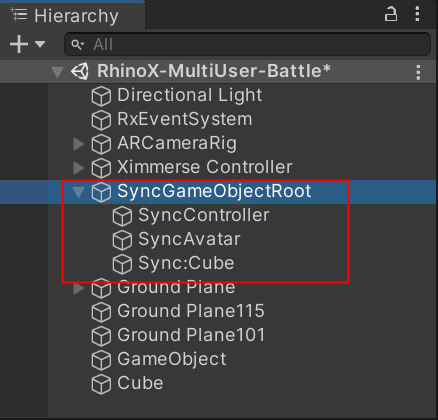
Tinet主要负责网络节点之间的互连以及消息收发,在一个场景中有且只能有一个Tinet Script。我们可以通过鼠标右键选择 需要同步的模型,通过 TiNet->Sync Identity 来一键创建同步需要用到的组件,此时会自动帮助您创建一个 SyncGameObjectRoot, 此物体上会挂载 Tinet Script,同步模型的组件在此目录下面。
1.TiNet类的工作流程
一个典型的RhinoX多用户协同应用的网络结构如下图所示:
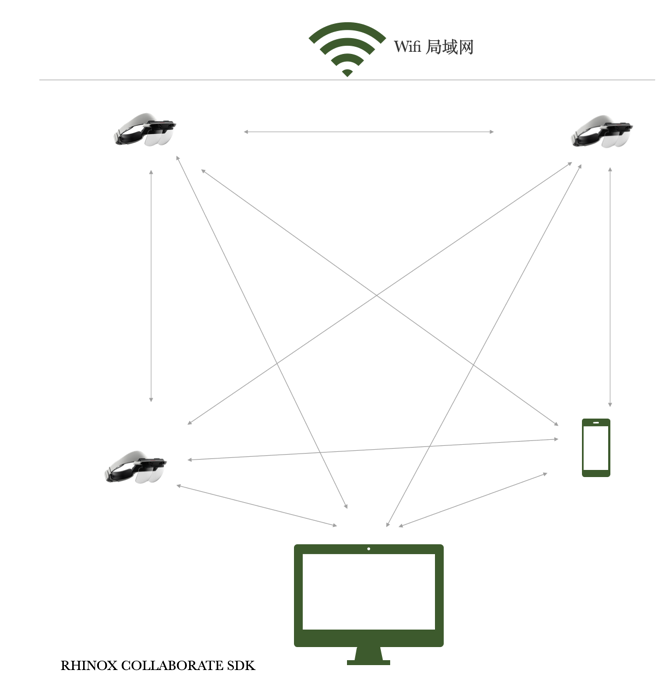
此结构中,包括有以下节点: RhinoX 用户, 电脑观察端,手机观察端。
设备之间建立通信的过程如下:
SDK启动, 获取自身IP地址。
SDK在本地监听一个 TCP 端口和一个 UDP 端口。相当于在设备上启动一个本地服务器。
自动向本地网关广播身份信息。 广播的身份信息包括设备自身的IP地址, 自身启动的TCP/UDP端口, 自身的Custom Tag(身份标识), Filter Word (过滤关键字)。 广播信息每一秒发送一次。
其他设备收听到广播的身份信息后, 跟踪 Filter Word 决定是否需要建立链接, 如果 Filter Word 条件满足, 则建立连接。 连接方式包括 TCP 和 UDP 连接。
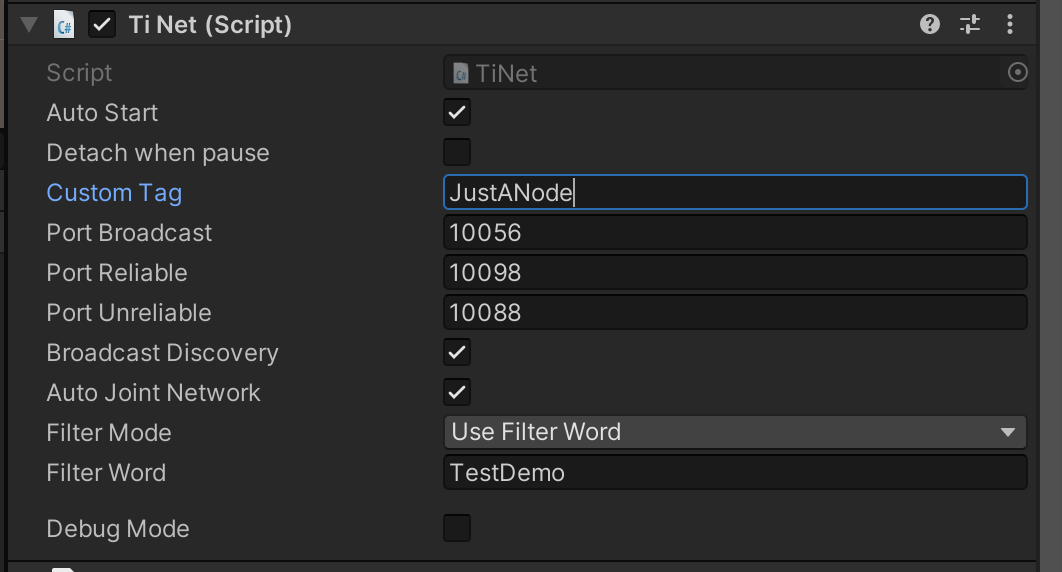
2.TiNet类字段属性详解
AutoStart : 是否自动启动TiNet的网络连接功能。如果为false,需要开发者调用 TiNet.Instance.StartNetworking() 方法启动网络。
Detach when pause : 是否在应用切回后台的时候, 切断网络连接。 对于RhinoX 或者手机应用, 切回后台的方式是按Home键。 对于电脑端应用, 切回后台的方式是将应用窗口最小化。
Custom tag : 身份标记。 此字段用于提供节点的身份标记。例如,RhinoX 用户可以给自身tag设置为 RhinoX User, 手机端 MR 可以给自身tag设置为 MR Mobile。用户通过 I_TiNetNode.CustomTag 获取相连节点的 Tag.
Port broadcast : 广播自动发现身份信息的网络端口。 应用之间必须使用同一个端口才能互相发现,可自定义此端口。
Port reliable : TCP 通讯端口,可自定义此端口。
Port unreliable : UDP 通讯端口,可自定义此端口。
Broadcast discovery : 是否广播身份信息。如果为false,则不会广播身份信息。 此字段适用于一些特殊的场景, 因为局域网广播所需要绑定的IP: 0.0.0.0 是一种不可复用的IP资源, 有可能存在同应用内,其他程序也需要绑定此 IP, 所以此字段的目的用于协调这种情况。当Broadcast discovery = false的时候, tinet 不会广播自身的身份信息,也就是不会自动和其他网络节点建立连接, 开发者需要调用 TiNet.Instance.TryConnectsTo() 方法建立连接。
Auto joint network : 是否自动加入网络。如果为false,即使收到了来自远端的身份广播信息, 也不会自动加入网络。
Filter Mode : 过滤模式, 可以使用filter mode + filter word 字段,过滤不属于同一个条件的节点。 例如, 如果 Filter Word = MyApp,则TiNet只会连接到其他的也是同一个关键字的网络节点。
当TiNet启动以后,显示面板会显示出它的已连接节点:
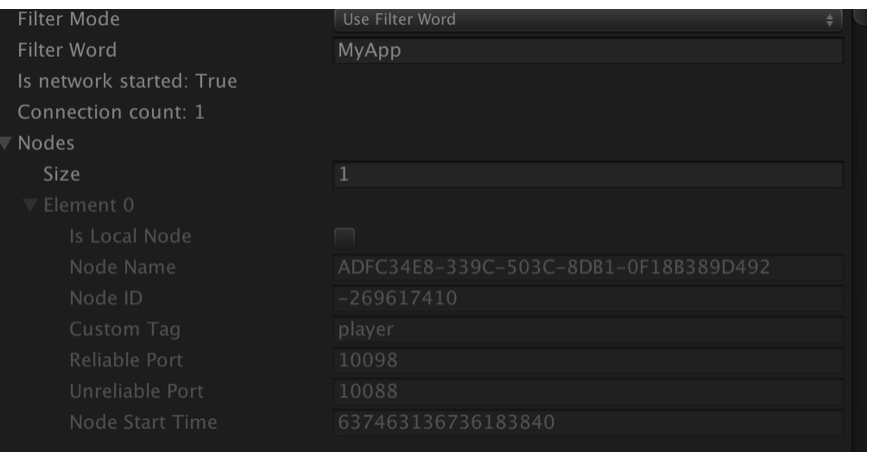
NodeName / Node ID : 是对方节点的名字和ID属性。
NodeName = SystemInfo.deviceUniqueIdentifier: 是和机器绑定的固定值。
Node ID: 是一个随机值,每次启动都会变化。
Custom Tag : 对方的tinet面板的Custom Tag。
Reliable port / Unreliable port : 对方的通信端口。
Node start time: 对方tinet 的启动时间戳。
开发者使用 TiNet.Instance.GetAllNodes(List<I_TiNetNode> Nodes) 获取当前所有连接的节点。
6.1.5 SyncIdentity类和网络对象的权限管理
每个能被同步的网络物体, 都使用 SyncIdentity 类来标记其唯一ID. SyncIdentity 类不一定要附着在同步GameObject,可以和同步GameObject分离。
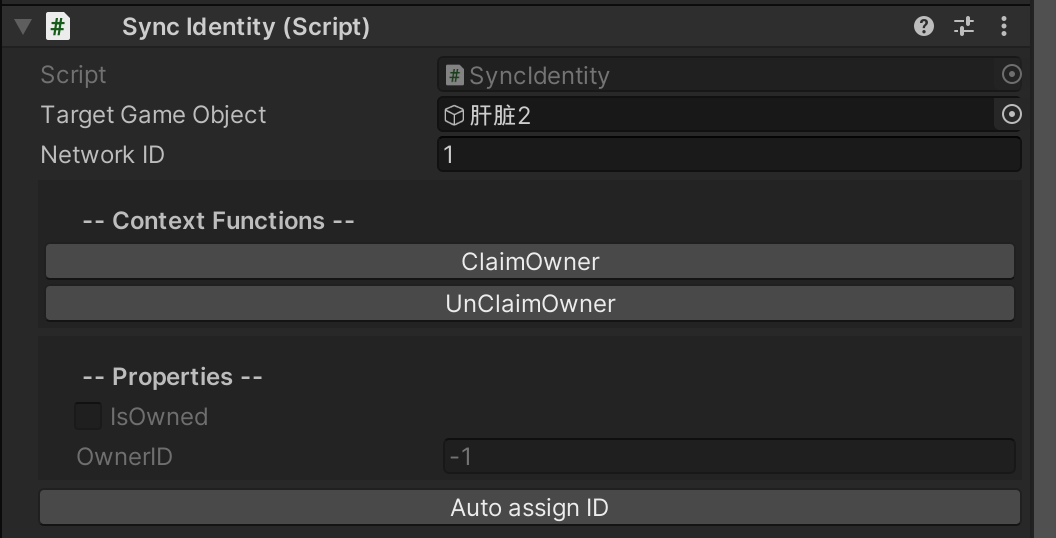
Target GameObject : 要同步的目标对象.
Network ID : 唯一ID。 场景中所有的 SyncIdentity 的 Network ID 不能重复。
ClaimOwner 和 UnclaimOwner 按钮 : 分别触发 SyncIdentity.ClaimOwner() 和 UnclaimOwner() 方法。 关于这两个方法的用途,请见此章后段的详细解释。
IsOwned 和 OwnerID 属性 : 标记此网络同步对象当前的拥有者节点ID. 如果此网络对象没有被任何网络节点拥有,则OwnerID = -1.
网络对象的权限
在经典的C/S网络架构中, 存在一个中心服务器, 所以大部分的网络对象, 都是由中心服务器来统一管理的。
例如,假设在一个网络游戏中,有三个玩家角色,若干个NPC角色. 我们以玩家和NPC角色的位置更新逻辑距离。
玩家角色的位置同步
当玩家角色移动的时候,其角色的位置会由玩家所控制器的客户端实时将自身的位置发送给服务器。服务器收到数据后,会校验这个位置是否合理,在排除了作弊,数据包错误等可能后,服务器 内部更新此玩家角色对象的位置, 然后将位置广播给其他的客户端程序。 而其他客户端程序收到角色位置信息后,自动更新自身程序内的此玩家角色的位置信息。
所以玩家角色的位置信息更新流程是 : 玩家 -> 服务器 -> 其他玩家.
可以看出,在经典C/S结构中, 玩家对象的权限属于玩家自身管理。
NPC角色的位置同步
由于NPC不属于任何玩家所控制,NPC的角色位置由服务器统一控制。 服务器只需要把NPC的位置广播给所有的玩家客户端, 而玩家客户端在收到来自服务器的NPC角色位置信息后, 自动更新本客户端程序内的NPC角色的位置数据。
所以NPC角色的位置信息更新流程是 : 服务器 -> 其他玩家
所以在经典C/S结构中, NPC对象的权限属于中心服务器管理。
以 TiNet 为核心的网络结构中,网络对象的权限管理
TiNet 网络是一个去中心化的拓扑结构,无论是属于玩家自身的物体(例如:RhinoX 用户的头部位置,双手控制器的位置),还是”NPC物体”的位置,其权限管理的核心思路都和 中心化的C/S结构有很大的不同。
SyncIdentity 的 Owner ID : TiNet 使用 SyncIdentity 类标记网络物体的唯一ID和其权限所有者节点的ID. 当用户需要改变某个物体的属性 (包括其位置,朝向,颜色,显隐状态等等)的时候, 需要先调用 SyncIdentity 的 ClaimOwner() 方法, 此方法会广播一条 ClaimOwnerMessage 消息给所有的网络节点, 占据目标对象的权限。 而其他网络节点收到此消息后, 会自动将此目标对象 的权限拥有者设置为ClaimOwnerMessage消息中的所标记的网络节点。
当权限变更以后,SyncIdentity的inspector 界面上显示的Owner ID字段会变化为权限拥有者的ID, 如下图:
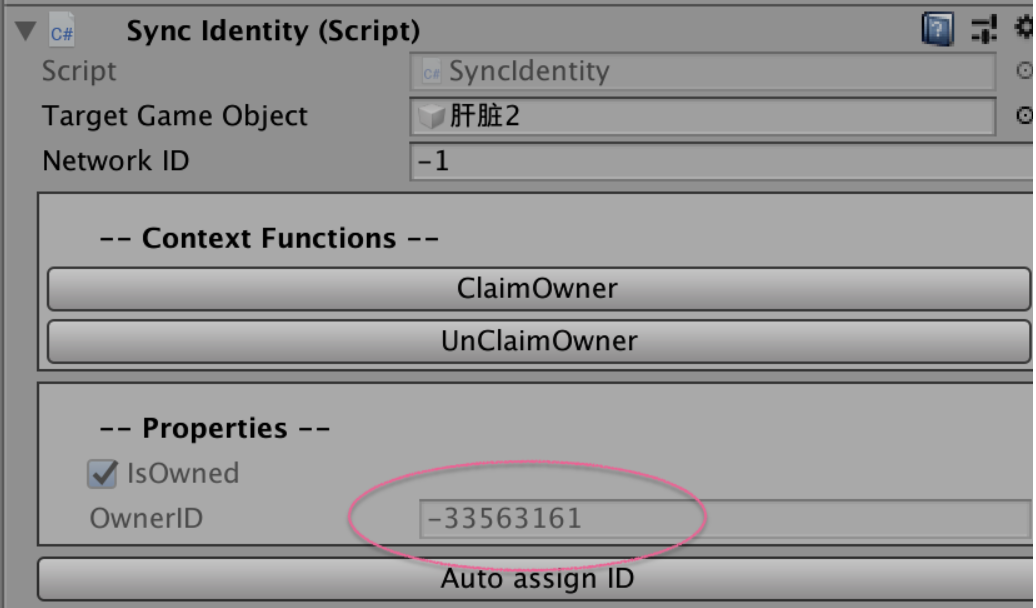
当SyncIdentity的权限被某一个节点获取后, 此节点就可以改动此对象的属性了。
应用示例: SyncGrabable.cs
SyncGrabable所实现的功能 : 当抓取发生的时候, SyncGrabable 脚本调用Grabable对象上的SyncIdentity 的ClaimOwner()方法, 当用户松开按键的时候, SyncGrabable 调用Grabable对象上的SyncIdentity 的UnClaimOwner()方法,释放Grabable对象的权限, 其他用户在原用户放下对象之后, 可以再抓取此对象。 一个时刻内, SyncIdentity的权限只会被一个节点所占据。
/// <summary>
/// Sync grabable:
/// - 在 target grabable 被其他的 TiNet node claim owner的时候disable grabable;
/// - 在 target grabable 的 权限被解除的时候, enable grabable;
/// - 在自己抓取的时候, claim owner
/// - 在自己释放的时候, release owner
/// </summary>
[RequireComponent (typeof(SyncIdentity))]
public class SyncGrabable : MonoBehaviour
{
SyncIdentity syncId;
Grabable grabable;
// Start is called before the first frame update
void Awake()
{
syncId = GetComponent<SyncIdentity>();
if (!syncId)
return;
grabable = syncId.TargetGameObject.GetComponent<Grabable>();
if (!grabable)
{
return;
}
SyncIdentity.OnClaimOwnershipByOtherNode += SyncIdentity_OnClaimOwnershipByOtherNode;
/// - 在自己抓取的时候, claim owner
/// - 在自己释放的时候, release owner
grabable.OnGrabBegin += Grabable_OnGrabBegin;
grabable.OnGrabEnd += Grabable_OnGrabEnd;
}
private void SyncIdentity_OnClaimOwnershipByOtherNode(SyncIdentity _syncId, UnityNetworking.I_TiNetNode node, bool isClaimed)
{
if(_syncId == syncId)
{
//被其他节点抓取:
if(isClaimed)
{
grabable.enabled = false;//在本地停用 grabable 组件,不允许本地用户抓取
}
//被其他节点释放:
else
{
grabable.enabled = true;//在本地启用 grabable 组件,不允许本地用户抓取
}
}
}
private void OnDestroy()
{
if(grabable)
{
grabable.OnGrabBegin -= Grabable_OnGrabBegin;
grabable.OnGrabEnd -= Grabable_OnGrabEnd;
}
SyncIdentity.OnClaimOwnershipByOtherNode -= SyncIdentity_OnClaimOwnershipByOtherNode;
}
private void Grabable_OnGrabEnd(PlayerHand arg1, Grabable arg2)
{
syncId.UnClaimOwner(); //在本地用户抓取的时候,获取权限
}
private void Grabable_OnGrabBegin(PlayerHand arg1, Grabable arg2)
{
syncId.ClaimOwner(); //在本地用户停止抓取的时候,释放权限
}
}
注解
总结: 在TiNet的P2P网络中,每个网络对象都需要通过ClaimOwner / UnClaimOwner 方式,实现对某个网络对象的权限获取与释放。只有当网络对象的权限被当前节点所拥有的时候,当前节点才能修改此对象的网络属性。
6.1.6 自定义网络消息
我们提供了一些常用的同步方法,如SyncTransform,SyncController等,如果您需要实现一些特殊的同步操作,可以参考 该章节自定义网络消息,实现同步。
在网络中传递数据的方式是通过 TiNetMessage 实现的。 开发者需要把同步数据封装在 TiNetMessage 的实现类上。
下面以 SyncTransformMessage 为例,说明如何继承实现 TiNetMessage 类。
using PolyEngine.UnityNetworking;
using UnityEngine;
namespace PolyEngine
{
/// <summary>
/// Message code 类定义每个消息的唯一标示字节码.
/// </summary>
public static class MessageCode
{
//定义一个消息码,此代码用于唯一标示 SyncTransformMessage 消息的代码。
//用户自定义消息的字节码必须从 0x0010 开始, 0x0010以下的字节码为系统预留.
//每个消息码必须是一个 short 长度的短整型数。
public const short kSyncTransform = 0x0011;
}
/// <summary>
/// SyncTransformMessage 封装需要同步transform的数据。
/// </summary>
[Message(MessageCode.kSyncTransform)] //每个 TiNetMessage 的实现类都需要在类型声明上添加 Message 属性,并标记其使用的消息码。
public class SyncTransformMessage : TiNetMessage
{
/// <summary>
/// 此 transform 的owner id。
/// </summary>
public int OwnerID;
/// <summary>
/// 此 transform 的 sync identity 的 network id
/// </summary>
public int NetworkID;
/// <summary>
/// 消息发出时候的时间戳。
/// </summary>
public long TimeTicks;
/// <summary>
/// 世界空间位置。
/// </summary>
public Vector3 WorldPosition;
/// <summary>
/// 世界空间朝向
/// </summary>
public Quaternion WorldRotation;
/// <summary>
/// 缩放。
/// </summary>
public Vector3 Scale;
/// <summary>
/// 是否位移开始时候发出的第一条同步消息
/// </summary>
public bool IsFirstMessage;
/// <summary>
/// The datetime from TimeTicks
/// </summary>
public System.DateTime time
{
get
{
return new System.DateTime(TimeTicks);
}
set
{
TimeTicks = value.Ticks;
}
}
/// <summary>
/// 从网络读取数据
/// </summary>
public override void OnDeserialize()
{
OwnerID = ReadInt();
NetworkID = ReadInt();
TimeTicks = ReadLong();
WorldPosition = ReadVector3();
WorldRotation = ReadQuaternion();
Scale = ReadVector3();
IsFirstMessage = ReadBool();
}
/// <summary>
/// 序列化数据到网络
/// </summary>
public override void OnSerialize()
{
WriteInt(OwnerID);
WriteInt(NetworkID);
WriteLong(TimeTicks);
WriteVector3(WorldPosition);
WriteQuaternion(WorldRotation);
WriteVector3(Scale);
WriteBool(IsFirstMessage);
}
}
}
注解
开发者要实现自定义消息发送网络消息,需要以下操作:
1.创建一个消息类,继承 TiNetMessage 。
2.为新的消息类,使用 MessageAttribute, 声明一个 short 类型的消息码。此消息码必须唯一,不能和别的消息类的消息码重复。而且必须大于 0x0010。
3.在 OnSerialize() 方法中,使用 TiNetMessage 的 Write 方法组,将自身的数据写入到网络中。
4.在 OnDeserialize() 方法中, 使用 TiNetMessage 的 Read 方法组, 按照序列化的顺序, 将Serialize()中写入的数据读取出来。
TiNetMessage 类提供以下方法,实现不同数据类型的写入和读取操作。
以下这些方法都是 protected 声明, 开发者可以在自定义的TiNetMessage中调用这些方法以读写网络数据。
类 |
方法 |
|---|---|
bool |
ReadBool() / WriteBool() |
bool[] |
ReadBools() / WriteBoolArray() |
byte |
ReadByte() / WriteByte() |
byte[] |
ReadBytes() / WriteByteArray() |
short |
ReadShort() / WriteShort() |
short[] |
ReadShorts() / WriteShortArray() |
int |
ReadInt() / WriteInt() |
int[] |
ReadInts() / WriteIntArray() |
long |
ReadLong() / WriteLong() |
long[] |
ReadLongs() / WriteLongArray() |
float |
ReadFloat() / WriteFloat() |
float[] |
ReadFloats() / WriteFloatArray() |
string |
ReadString() / WriteString() |
strings |
ReadStrings() / WriteStringArray() |
Vector2 |
ReadVector2() / WriteVector2() |
Vector2[] |
ReadVector2s() / WriteVector2Array() |
Vector3 |
ReadVector3() / WriteVector3() |
Vector3[] |
ReadVector3s() / WriteVector3Array() |
Quaternion |
ReadQuaternion() / WriteQuaternion() |
Quaternion[] |
ReadQuaternions() / WriteQuaternionArray() |
6.1.7 发送数据
在上一章节中,我们实现了一个 SyncTransformMessage, 此消息类的功能是将一个Transform的位置和姿态信息发送给其他的网络节点。
以下代码示例如何发送消息:
/// <summary>
/// 以下代码示范如何发送网络消息。
/// </summary>
/// <param name="node"></param>
private void SendSyncMessage(I_TiNetNode node)
{
SyncTransformMessage syncTransMessage = TiNetUtility.GetMessage<SyncTransformMessage>(); //从缓存池中获取一个 SyncTransformMessage 消息对象。
//给消息体赋值:
syncTransMessage.NetworkID = this.SyncIdentity.NetworkID; //网络唯一id
syncTransMessage.OwnerID = TiNetManager.NodeID;//改变此transform的拥有者的网络节点id
syncTransMessage.TimeTicks = DateTime.Now.Ticks;//时间戳
syncTransMessage.WorldPosition = syncTransform.position;//位置
syncTransMessage.WorldRotation = syncTransform.rotation;//朝向
syncTransMessage.Scale = syncTransform.localScale;//缩放
//如果node为null,则以udp通道发送给全部的节点
if(node == null)
{
syncTransMessage.SendToAllUnreliable();
}
else
{
//以tcp通道发送给指定节点
syncTransMessage.SendToReliable(node);
}
}
两种通道 : Reliable 和 Unreliable
TiNet支持ReliableMessage和UnreliableMessage. ReliableMessage通过 TCP/IP协议发送 , UnreliableMessage通过 UDP协议发送。
两种通道相比, TCP 通道适合发送确定性的,不能被丢失的,低频的消息。 例如: 网络物体的权限的获取/释放。
UDP通道适合发送高频的,可以偶尔丢失的消息, 例如: RhinoX用户头部的实时位置和朝向, 这些数据偶尔丢失一帧并没有很大的影响。
Unreliable 方法:
TiNetMessage.SendToAllUnreliable(); //此方法发送给所有的和当前TiNetNode互相连通的节点。使用的是UDP协议,存在丢包的可能。
TiNetMessage.SendToUnreliable(I_TiNetNode Node); //此方法发送给指定的 TiNetNode节点。使用的是UDP协议,存在丢包的可能。
Reliable方法:
TiNetMessage.SendToAllReliable(); //此方法发送给所有的和当前TiNetNode互相连通的节点。使用TCP/IP协议,保证传输可靠性。
TiNetMessage.SendToReliable(I_TiNetNode Node); //此方法发送给指定的 TiNetNode节点。使用TCP/IP协议,保证传输可靠性。
获取所有的连接节点的方法:
TiNet.Instance.GetAllNodes();
6.1.8 接收数据
以位置同步消息的实现模式为例, 如下代码可以监听 SyncTransformMessage 消息:
// <summary>
// Sync transform
// </summary>
RequireComponent(typeof(SyncIdentity))]
ublic class SyncTransform : MonoBehaviour, TiNetMessageHandler
/// <summary>
/// Message callback : on transform message received.
/// </summary>
[TiNetMessageCallback(MessageCode.kSyncTransform)]
static void OnSyncTransformMessage(TiNetMessage message, I_TiNetNode node)
{
SyncTransformMessage syncTransMsg = message as SyncTransformMessage;
int networkID = syncTransMsg.NetworkID;
//Debug.LogFormat("On sync transform message : {0}", networkID);
//同步 sync transform 信息:
if(SyncIdentity.Get(networkID, out SyncIdentity entity) && entity != null && entity.IsOwned == false && entity.HasComponent(out SyncTransform syncT))
{
long syncTime = syncTransMsg.TimeTicks;
//只取时间戳最新的更新:
if(syncT.m_SyncTimeStamp.HasValue == false || syncT.m_SyncTimeStamp.Value < syncTime)
{
syncT.m_PreviousOwnerID = syncTransMsg.OwnerID;
syncT.m_SyncTimeStamp = syncTransMsg.TimeTicks;
Transform t = entity.TargetGameObject.transform;
t.position = syncTransMsg.WorldPosition;
t.rotation = syncTransMsg.WorldRotation;
t.localScale = syncTransMsg.Scale;
syncT.OnSyncTransformChanged?.Invoke(t.gameObject);
}
}
}
}
注解
开发者要监听自定义消息,需要以下操作:
1.创建一个自定义Monobehaviour 实现 TiNetMessageHandler 接口.
2.声明一个静态方法,加上 TiNetMessageCallback 属性签名, 并将自定义消息的消息码(也就是示例代码中的 MessageCode.kSyncTransform) 交给TiNetMessageCallback属性的构造参数。并且静态方法的签名必须是 void FunctionName(TiNetMessage message, I_TiNetNode node) . message 就是收到的消息, node 是发送此消息的节点。
3.在静态方法中, 将message参数转换为要处理的自定义消息类即可读取它的数据了。
警告
TiNet系统使用C#反射机制将消息类和对应的静态处理方法做映射关联, 如果在打包apk的时候,打开了 Code Stripping 开关, 会导致被声明为 private static 的静态处理方法在打包过程被Unity引擎从最终生成的二进制库中移除。
解决办法是 : 关闭 Code Stripping 开关,或者使用 link.xml 将 PolyEnginePlugins.dll 和上层代码声明为 preserved.
关于 link.xml 文件的用法,见 Unity 官网文档: https://docs.unity3d.com/Manual/ManagedCodeStripping.html
<linker>
<assembly fullname="TiNetSync" preserve="all"/>
<assembly fullname="PolyEnginePlugins" preserve="all"/>
</linker>
用于同步网络对象的transform 的 SyncTransform.cs 完整代码:
using System.Collections;
using System.Collections.Generic;
using PolyEngine.UnityNetworking;
using UnityEngine;
using System;
namespace PolyEngine
{
/// <summary>
/// Sync transform
/// </summary>
[RequireComponent(typeof(SyncIdentity))]
public class SyncTransform : TiNetMonoBehaviour
{
/// <summary>
/// 最近一次更新 transform 的时间戳。
/// </summary>
long? m_SyncTimeStamp;
/// <summary>
/// Sync interval.
/// </summary>
[MinValue (0.01f)]
public float SyncInterval = 0.05f;
float m_LastSyncTime;
/// <summary>
/// 对上一次更新的 Owner ID。
/// </summary>
private int m_PreviousOwnerID;
/// <summary>
/// 对上一次更新的 Owner ID。
/// </summary>
[InspectFunction]
public int PreviousOwnerID
{
get
{
return m_PreviousOwnerID;
}
}
/// <summary>
/// 用于标注更新数据的时间戳
/// </summary>
[InspectFunction]
public long SyncTimeStamp
{
get
{
return m_SyncTimeStamp.HasValue ? m_SyncTimeStamp.Value : 0;
}
}
Transform syncTransform
{
get => this.SyncIdentity.TargetGameObject.transform;
}
/// <summary>
/// Event : on sync transform is changed.
/// Parameter : the changed gameobject's.
/// </summary>
public event Action<GameObject> OnSyncTransformChanged = null;
protected override void TiNet_OnNodeConnected(I_TiNetNode node)
{
if (m_SyncTimeStamp.HasValue)
{
SendSyncMessage(node);
//Debug.LogFormat(gameObject, "{0} send sync transform message on node connected", name);
}
}
/// <summary>
/// Sends sync transform message to speicific node , or to all nodes.
/// </summary>
/// <param name="node"></param>
private void SendSyncMessage(I_TiNetNode node)
{
SyncTransformMessage syncTransMessage = TiNetUtility.GetMessage<SyncTransformMessage>();
syncTransMessage.NetworkID = this.SyncIdentity.NetworkID;
syncTransMessage.OwnerID = TiNetManager.NodeID;
syncTransMessage.TimeTicks = DateTime.Now.Ticks;
syncTransMessage.WorldPosition = syncTransform.position;
syncTransMessage.WorldRotation = syncTransform.rotation;
syncTransMessage.Scale = syncTransform.localScale;
if(node == null)
{
syncTransMessage.SendToAllUnreliable();
}
else
{
syncTransMessage.SendToReliable(node);
}
this.m_SyncTimeStamp = syncTransMessage.TimeTicks;
}
protected override void TiNet_OnNodeDisconnected(I_TiNetNode node)
{
}
private void FixedUpdate()
{
//如果 SyncIdentity 处于 Owned 状态:
if (this.SyncIdentity.IsOwned)
{
//Debug.LogFormat("Transform has change: {0}, time-interval: {1}", syncTransform.hasChanged, (Time.realtimeSinceStartup - m_LastSyncTime));
if(TransformDirty() && (Time.realtimeSinceStartup - m_LastSyncTime) >= SyncInterval)
{
SendSyncMessage(null);
m_LastSyncTime = Time.realtimeSinceStartup;
}
}
}
/// <summary>
/// Message callback : on transform message received.
/// </summary>
[TiNetMessageCallback(MessageCode.kSyncTransform)]
static void OnSyncTransformMessage(TiNetMessage message, I_TiNetNode node)
{
SyncTransformMessage syncTransMsg = message as SyncTransformMessage;
int networkID = syncTransMsg.NetworkID;
//Debug.LogFormat("On sync transform message : {0}", networkID);
//同步 sync transform 信息:
if(PolyEngine.SyncIdentity.Get(networkID, out SyncIdentity entity) && entity != null && entity.IsOwned == false && entity.HasComponent(out SyncTransform syncT))
{
long syncTime = syncTransMsg.TimeTicks;
//只取时间戳最新的更新:
if(syncT.m_SyncTimeStamp.HasValue == false || syncT.m_SyncTimeStamp.Value < syncTime)
{
syncT.m_PreviousOwnerID = syncTransMsg.OwnerID;
syncT.m_SyncTimeStamp = syncTransMsg.TimeTicks;
Transform t = entity.TargetGameObject.transform;
t.position = syncTransMsg.WorldPosition;
t.rotation = syncTransMsg.WorldRotation;
t.localScale = syncTransMsg.Scale;
syncT.OnSyncTransformChanged?.Invoke(t.gameObject);
}
}
}
bool TransformDirty()
{
if(Application.isMobilePlatform)
{
//Android always return transform changed == FALSE
return true;
}
else
{
bool dirty = syncTransform.hasChanged;
//Check transform dirty:
if (dirty)
{
syncTransform.hasChanged = false;
}
return dirty;
}
}
}
}
6.1.9 多人对战示例解析
此章节借助于多人对战demo,介绍该工具库在使用中需要注意的点以及一些简单的使用技巧。
多用户对战Demo下载地址: https://gitee.com/PolyEngine_Ent/rhinox-multiuser-battle
1.数据传输协议选择
Reliable方法
使用TCP协议,用于比重较要的数据发送,比如玩家Avatar的创建和血量的更新等
TiNetMessage.SendToAllReliable();
TiNetMessage.SendToReliable(I_TiNetNode Node);
Unreliable方法
使用UDP协议,用于不太重要的数据发送,可以允许偶尔丢失,比如玩家Avatar的位置同步等
TiNetMessage.SendToAllUnreliable();
TiNetMessage.SendToUnreliable(I_TiNetNode Node);
2.如何管理多人游戏中的资源生命周期
Avatar
创建Avatar
继承TiNetMonoBehaviour,重写TiNet_OnNodeConnected方法,当有玩家加入时会触发,可在此方法里发送本地Avatar信息进行创建
更新Avatar
Avatar预设上添加SyncIdentity和SyncTransform脚本,设置NetworkID,可以进行位置和方向的同步
销毁Avatar
继承TiNetMonoBehaviour,重写TiNet_OnNodeDisconnected方法,当玩家断线时会触发,可在此方法里销毁其他玩家Avatar
同步Gun
添加SyncController脚本,选择PlayerHandPrefab和SyncControllerIndex,当有手柄加入时会同步Gun位置和方向
同步Bullet
RXInput.IsButtonDown(RhinoXButton.ControllerTrigger, ControllerIndex.Controller_Right_Controller)
当手柄触发Trigger键时发送创建Bullet消息,位置同步与Avatar类似,销毁也发送对应消息,可以考虑使用对象池进行管理
3.关于定位问题的一些注意要点
游戏中需要添加GroundPlane,右键选择RhinoX/Ground Plane/Beacon 01/02/03,ARCamera上的TrackingProfile需要设置
注解
进入游戏时玩家需要看向Beacon进行位置定位,如果在游戏中双方玩家位置不匹配,可以在GroundPlane上添加RuntimeGizmos脚本,在头显里查看Gizmos是否Beacon匹配
玩家Avatar的原点位置需要设置在头上,与ARCamera位置匹配,可参考Demo设置的参数,Gun与手柄的位置也可参考Demo
6.2 第三视角展示
第三视角即,以一个旁观者的视角同时观察戴上头显的的体验者以及他正在操作的虚拟场景的画面,即一个虚实融合的画面效果,具体如下图。
此功能可以在多种平台上实现,包括Android、iOS、Windows等,下面我们将提供移动端(Android/iOS),以及PC端(Windows) 两种类型终端上的实现方式示例。
注解
第三视角的开发必须用到网络同步功能,所以在开发此功能之前,建议您先学习 6.1 多用户协同网络工具库 多人协同的内容
原理解释
第三视角,我们又叫MR直播,是通过在手机(或者PC)上安装一个应用,来呈现一个虚实融合的MR画面。这个应用有3个功能
1.显示跟用户在头显中看到的一样的虚拟场景
2.调用摄像头实时拍摄现场的操作者以及环境画面
3.然后将虚拟场景跟摄像头拍摄的画面进行融合,就成了我们看到的MR视频
手机(或者PC)中的虚拟场景是运行在本地的,而不是头显传输过来的视频。同步的原理也是,通过局域网同步模型的交互数据给手机, 所以需要的网络带宽很小,延时也会比较小
当然MR也会涉及到坐标系的对齐,即头显的坐标系跟手机(或者PC)的坐标系进行对齐。
手机跟头显的坐标系对齐是通过Beacon跟彩色标定板对齐来实现的。因为头显只能识别Beacon,而手机只能识别彩色定位板。 Beacon代表了头显的坐标原点,彩色定位板代表了手机的坐标原点。如果我们将Beacon跟彩色定位板对齐,就相当于将头显跟手机的坐标原点对齐了。
PC上的坐标对齐方法类似,但是使用上稍有区别,我们下面单独解释。
1.移动端实现方法
此章节主要介绍如何利用移动端设备上的AR系统能力,来实现第三视角的功能,使用到的移动端设备必须具备AR功能
Android系统设备:支持ARCore, ARCore设备支持列表
iOS系统设备:支持ARKit, ARKit设备支持列表
原理解释
这里我们主要用到ARCore的图像识别以及SLAM定位的能力,通过图像识别来进行场景的坐标原点定位,以及与头显坐标系统的对齐, 然后借助SLAM定位实现在自由移动设备时的定位,这也是PC第三视角方案不具备的。
开发路径
开发前请务必确保自己已经理解清楚第三视角实现的原理。
首先需要开发一个具备网络同步功能的,可以运行在RhinoX上工程,详细步骤可参考示例教程里面的, 多人大空间协同 示例
然后,开发一个ARFoundation的项目,并加入网络同步的功能,详细步骤参考, 移动端第三视角 示例
注意
注意不要将两个工程混淆,他们不是同一个工程,是运行在不同设备上的两个工程。
分别将两个工程打包出来,前者安装在RhinoX头显上,后者安装在需要进行第三视角拍摄的设备上(Android/iOS)
这里我们会用到网络同步以及ARFoundation,Tinet网络同步请参考上面多人协同模块文档,ARFoundation 请参考 Unity ARFoundation使用文档
2.PC端实现方法
此章节介绍如何利用USB摄像头( 采购链接 ),以及Windows PC实现第三视角的方法
原理解释
首先我们需要通过一个标定工具,来将头显里面场景的坐标系与PC里面的场景坐标系对齐。标定的方式与移动端类似,也是借助于一个标定 图案与Beacon对齐的方式来实现。标定完成后,会生成一个标定参数,用于后续的读取。
接下来我们需要利用Unity开发一个在Windows系统上运行的程序,此程序包含跟头显里面一样的场景,以及上面提到的网络同步模块 同时还需要添加一个标定参数的读取模块,通过此模块读取标定工具生成的标定参数,将Unity中的场景显示在标定的位置上
使用的的时候,我们只需要将Beacon摆放在标定时摆放的位置,戴上头显使用,PC端就会出现一个虚实融合的MR视频效果。
如果Beacon摆放的位置偏移了,则会出现真实的人与虚拟场景错位的现象。
然后再开发一个头显端运行的应用来进行操作,将操作的动作同步到PC端,头显端的应用只需要使用RhinoX Unity SDK以及网络同步 模块即可。您可以直接使用 多人大空间协同 来进行测试,里面的场景与PC端一样,都是一个肝脏器官的模型。
开发路径
示例下载
在示例教程中选择 “PC端第三视角” 示例,下载示例以及文档
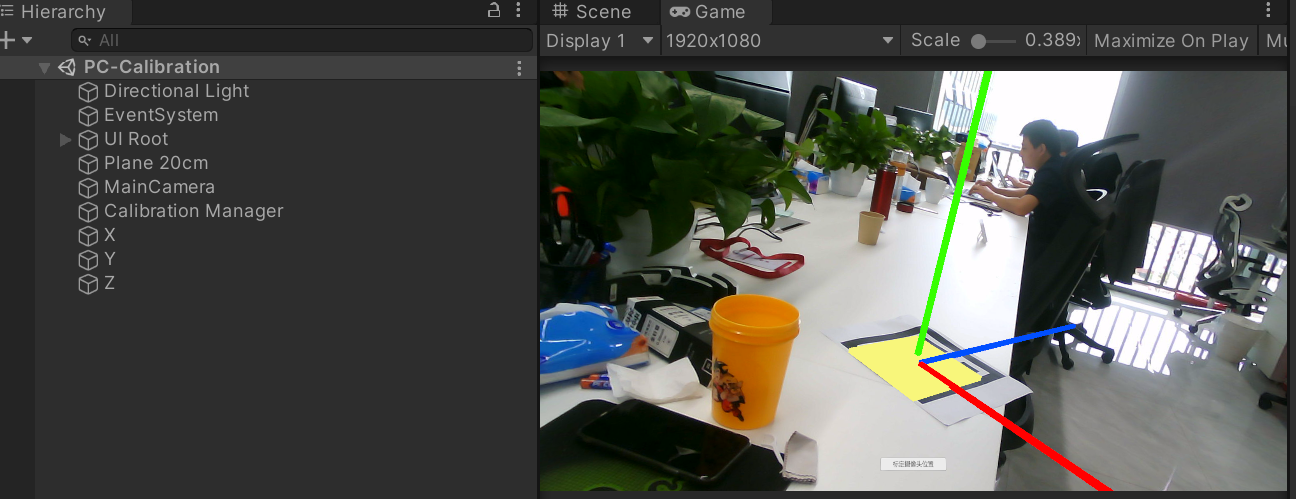
我们以2019版本为例简单描述如何使用该demo,demo结构如下图
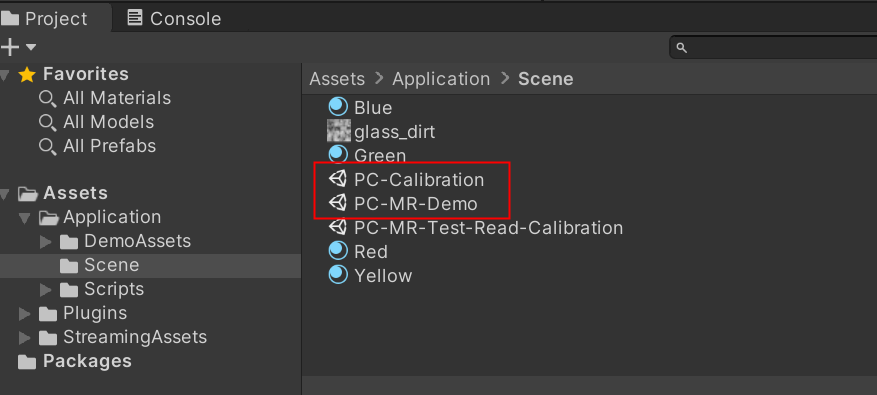
PC-Calibration场景展示如何进行标定,可以单独打包该场景作为标定工具
PC-MR-Demo场景展示如何读取上面生成的标定参数,并将需要展示的场景显示在合适的位置,同时调用摄像头,展示虚实融合的画面
标定
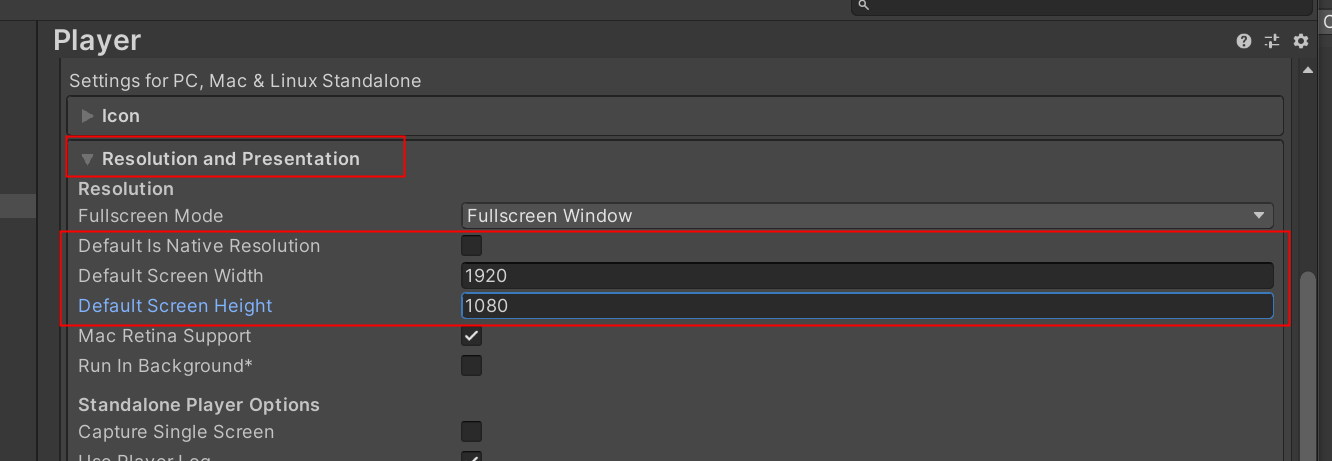
首先,我们将推荐的摄像头接上PC(如果没有,可用其他USB摄像头代替),将标定图片用A4纸打印,可以直接在编辑器里面运行 PC-Calibration场景,将Game视窗分辨率设置为1920x1080,运行成功后点击Game视窗下的“开始标定”按钮,标定成功后如下图
注解
标定参数默认存放在下图路径,有些电脑无法在C盘下创建文件夹,如果无法自动创建,您可以手动创建,或者修改存放路径

如果在编辑器里面运行成功,我们可以将此场景打包出来,打包时需要将分辨率设置为1920x1080
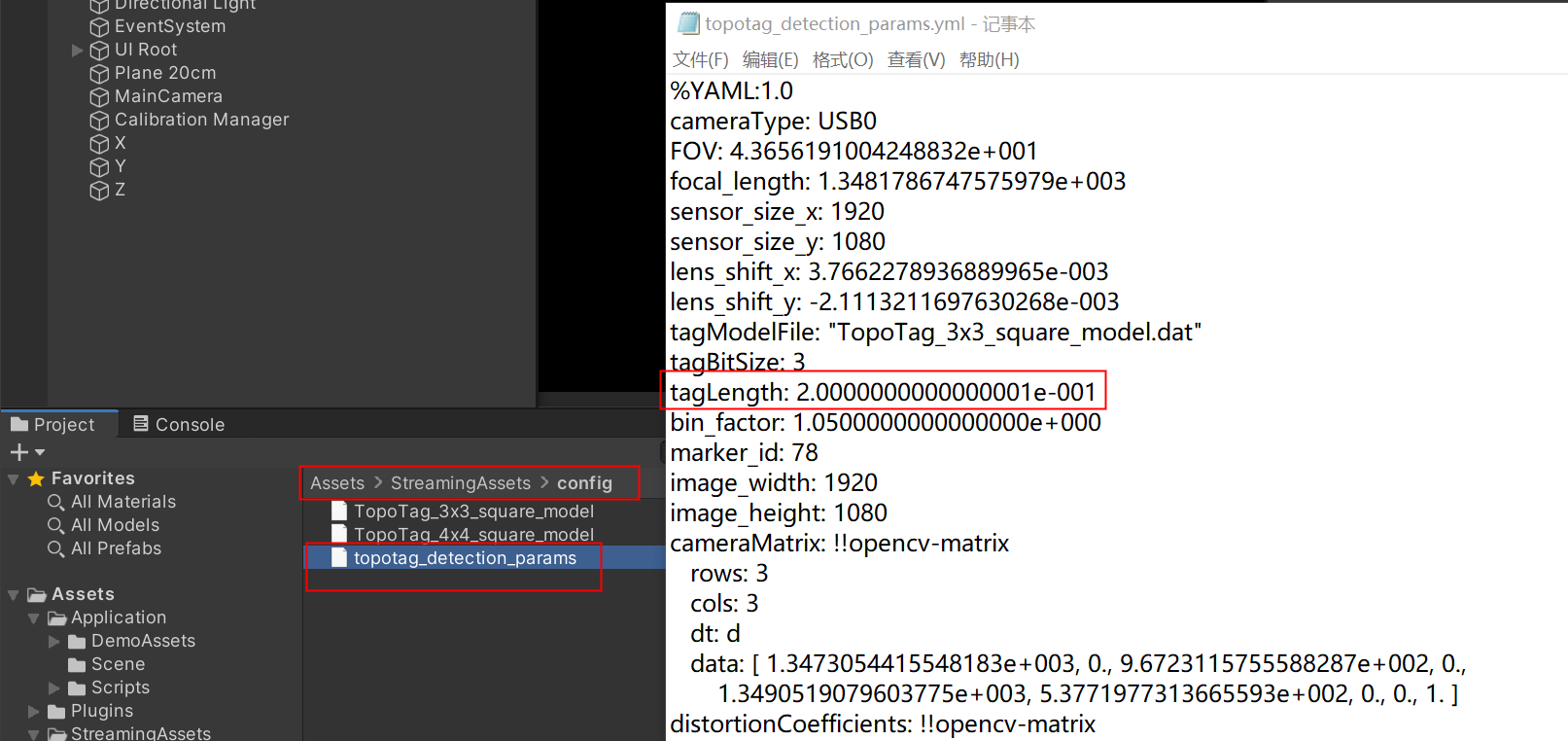
为了方便测试,我们将标定图片的默认尺寸设置为20cm(即A4纸尺寸),因此识别距离有限,如果您希望识别更远的距离,可在如下路径 下修改图片尺寸,并打印对应尺寸的图片进行标定,实际项目使用我们一般推荐50cm
标定完成之后即可参考PC-MR-Demo项目来进行PC上的应用开发,建议直接将此demo拷贝到您的项目中进行改造